OSTALI SEMINARSKI
RADOVI IZ ELEKTRONIKE / ELEKTROTEHNIKE |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
INDUKTIVNI SENZORI
1. INDUKTIVNI SENZORI
1.1. Princip rada
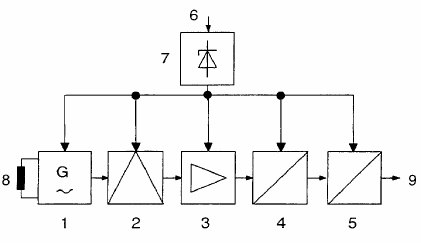
Induktivni senzor pomaka je sastavljen od električnog oscilatora, preklopnog stupnja i pojačala, slika 1.1.1. Priključenjem napona na ovaj senzor oscilator proizvodi visoko frekfrentno elektromagnetno polje koje se rasprostire u prostor oko senzora. Ako se u blizinu senzora pojavi metalni dio oscilator se prigušuje. Prigušenje djeluje na preklopni stupanj, koji preko pojačala daje izlazni signal. Induktivni senzori pomaka reagiraju samo na metale ili grafit.
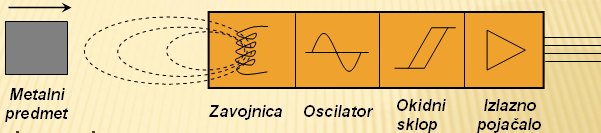
Slika 1.1.1 Blok shema induktivnog senzora
Induktivni senzori rade na principu promjene induktiviteta zavojnice u LC titrajnom krugu. Visokofrekvencijsko magnetsko polje zavojnice se zbog upotrebe poluotvorene feritne jezgre dijelom nalazi i u zraku (sl. 1.1.2).
Unošenje metalnog objekta u dio magnetskog polja koji je u zraku rezultira promjenom induktiviteta zavojnice, a time i promjenom amplitude i frekvencije titranja LC kruga. Druga mogućnost interpretacije ove pojave je induciranje kružnih struja u metalnom objektu, koje izvlače energiju za titranje iz titrajnog kruga, pritom smanjuju_i amplitudu i frekvenciju oscilacija. Okidni sklop s histerezom u senzoru detektira te promjene i u određenoj točki mijenja stanje izlaza senzora.
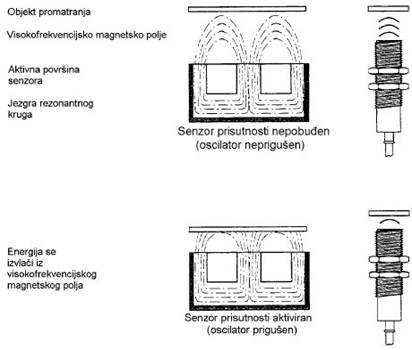
Slika 1.1.2 Princip rada induktivnog senzora
1.2. Karakteristike Induktivnih senzora
Prednosti:
- male dimenzije
- visoka preciznost pri ponavljaju
- raznovrsni spojni oblici
- dobra otpornost na interferenciju
- raznovrsni spoini oblici
- široki naponski opseg
- nepropusni za prašinu, vodu, ulje
- otporni na vibracije
- zaštićeni od kratkog spoja i krivog spajanja
- bezkontaktni princip (nema habanja-dug vijek trajanja)
- mogu mijeriti kroz drugi materijal
Nedostaci:
- senzor nije pogodan za mjerenje protoka kod tekućina niske provodljivosti poput čiste vode
- senzor sporo reagira na promjenu temperature, zato nije prikladan za mjerenje kod tekućina kojima se temperatura mijenja brzo
- detektira samo metalne predmete
Prikaz karakteristika induktivnog senzora LM05-3001NA

2. Izvedbe induktivnih senzora
2.1 Induktivni šestkomponentni senzor sile
Ovaj senzor je jednostavne konstrukcije. Senzor se sastoji od dvije ploče, gdje je jedna ploča pričvršćena na posljednji segment robota a druga je ploča spojena sa hvataljkom. Između ploča se nalaze tri opruge. Djelovanjem sile ploče se primiču jedna prema drugoj po osi Z. Sila i moment se određuju na osnovu međusobnog položaja ploča. S obzirom da je pomicanje ploča određeno sa šest komponenti, tad je potrebno i šest mjernih uređaja (senzora).
Kao mjerni elementi se najčešće koriste kapacitivni i induktivni senzori. Prikaz jednog takvog šestkomponentnog senzora prikazan je na slici 2.1.
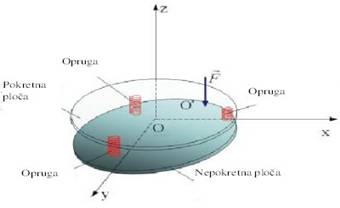
Slika 2.1 Induktivni šestkomponentni senzor
2.2 Induktivni senzori blizine
Princip rada ovih senzora zasniva se na zavisnosti induktivnosti kalema od promjene magnetske otpornosti. Približavanjem predmeta senzoru raste induktivnost, a udaljavanjem smanjuje. Shema jednog takvog senzora prikazana je na slici 2.2.1
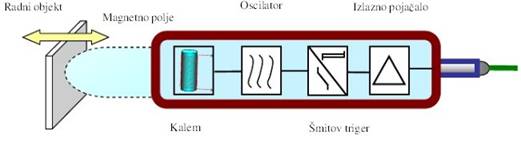
Slika 2.2.1 Struktura induktivnog senzora blizine
Priključenjem senzora na izvor napajanja električnom energijom dolazi do oscilacija na rezonantnoj frekvenciji. Ove oscilacije su uzrok stvaranja elektromagnetskog polja čiji je pravac prostiranja u smjeru osi senzora. Izlani signal mijenja se s promjenom udaljenosti predmeta. Induktivni senzori se izrađuju kao "U" profili, cilindrični i prizmatični profili kako je to prikazano na slici 2.2.2.
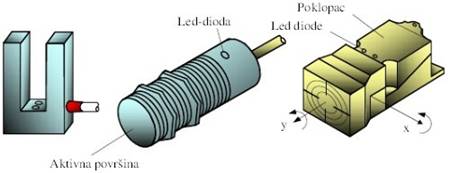
Slika 2.2.2 Konstruktivne izvedbe induktivnih senzora
Kućište ovih senzora se uglavnom izrađuje od nehrđajućeg čelika ili polimera. Na samom kućištu se često ugrađuju led diode za vizualnu indikaciju stanja i ispravnost napajanja. Induktivni senzori se lako ugrađuju, neki konstrukcijski detalji ugradnje induktivnih senzora prikazani su na slici 2.2.3.
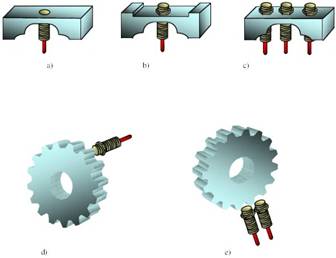
Slika 2.2.3 Konstrukcijski detalji ugradnje induktivnih senzora
- direktna ugradnja
- ugradnja u udubljenju
- ugradnja u nizu
- detekcija kutne brzine
- detekcija kutnog ubrzanja
Na slici 11. pod "a" imamo način ugradnje senzora zavisno od primjene. Da bi se izbjegao utjecaj kućišta na induktivnost, senzor se može ugraditi i u udubljenje ( "b")
2.3 Elektromagnetski induktivni senzor
Ovi senzori su robusnije građe, i kao takvi su pogodni za detekciju većih predmeta. Na slici 2.3.1 je prikazan jedan takav senzor koji ima 8x8 induktivnih elemenata transformacijskog tipa. Svaki element se sastoji od čeličnog šiljka koji je smješten u plastičnom cilindru i opruge od fosforne bronce.
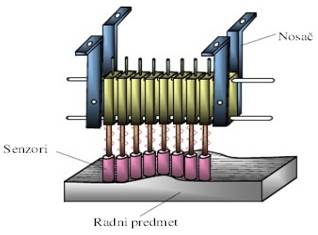
Slika 2.3.1 Elektromagnetski induktivni taktilni senzor
Bronca je upotrebljena za izradu opruga, čime opruga dobiva dobra elastična svojstva i ne ometa magnetsko polje. Pomicanjem mjernog šiljka mjenja se napon u primarnim i sekundarnim namotajima smještenim u gornjem djelu uređaja. Izlazni signal je binaran, tako da se pomoću određenog sklopa može dobiti binarna slika objekta koji se mjeri. Poželjno je da senzor prati što manje krivine, a posebno treba paziti da ne dođe do zaglavljivanja šiljka u plastičnu cijev.
2.4 Analogni induktivni senzor
Analogni induktivni senzor udaljenosti, slika 2.4.1, radi na istom principu kao i induktivni senzor prisutnosti (promjena induktiviteta i nadomjesnog otpora zavojnice, čija je jezgra feritna i poluotvorena, kada vodljivi predmet osjetno uđe u dio njenog magnetskog polja koji je u zraku, no nema histerezni sklop kojim bi detektirao samo prisutnost, već koristi demodulacijski sklop kojim se postiže kontinuirano mjerenje udaljenosti predmeta. Naime, promjenom induktiviteta i prigušenja (nadomjesnog otpora zavojnice), mijenjaju se titrajna svojstva ugrađenog LC kruga, tj. amplituda i frekvencija titranja. Demodulacijskim sklopom titrajni se signal prevodi u signal spreman za daljnju obradbu. Blok dijagram analognog induktivnog senzora dan je na slici 2.4.2. Signal na izlazu demodulacijskog sklopa se pojačava, potom linearizira i konačno kondicionira u izlaznom stupnju senzora.
Slika 2.4.2 Blok dijagram analognog induktivnog senzora
Linearizacija je potrebna zbog nelinearne ovisnosti amplitude i frekvencije oscilacija o udaljenosti predmeta. Gušenje oscilacija ovisi o vodljivosti, permeabilnosti, obliku i blizini predmeta kojeg se detektira, pa je ovisnost izlaza senzora o udaljenosti predmeta drugačija od primjene do primjene i treba ju prije korištenja senzora utvrditi

Slika 2.4.2 Analogni induktivni senzor
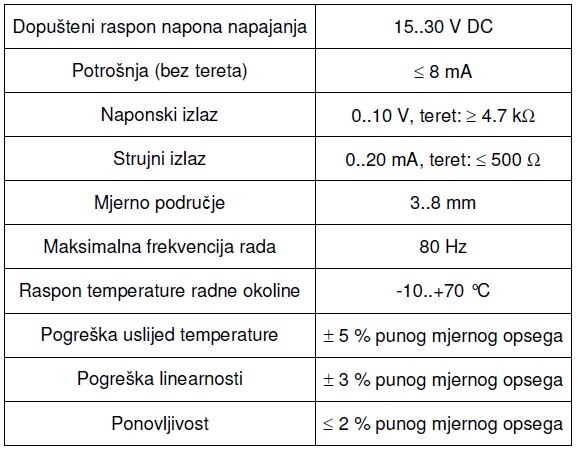
Tablica 1. Karakteristike Analognog induktivnog senzora D.ER-SIEA-M30
3. Primjena induktivnih senzora
Induktivni senzori korišteni su u mnogo različitih aplikacija. Koriste se pri kontroli, reguliranju, automatizaciji, pozicioniranju i nadgledanju proizvodnog procesa. Najčešće se primjenjuju u industriji plastičnih masa, robotici, tekstilnoj, drvoprerađivačkoj i auto industriji i svugdje gdje proizvodni proces treba da je automatiziran. Postoji i primjena u energetskoj industriji gdje se mogu koristiti pri konstrukciji plosnatih transformatora, generirajući elektromagnetska polja, kao i za praćenje induktivnosti električnih komponenti. Induktivni senzori se naširoko koriste za detektiranje prisutnosti električnog napona u uređajima, i lošeg uzemljenja.
Na slici 3.1 je prikazana primjena induktivnog senzora za kontrolu brzine okretanja pogona transportera preko izbočine na pogonskoj osovini u obliku glave vijka.
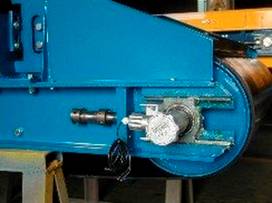
Slika 3.1 Induktivni senzor kontrole brzine
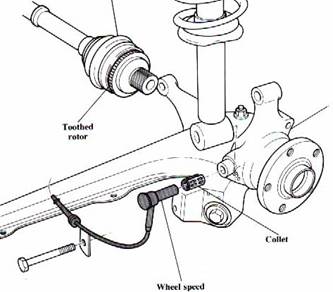
Slika 3.2 Primjena senzora kod automobila (ABS)

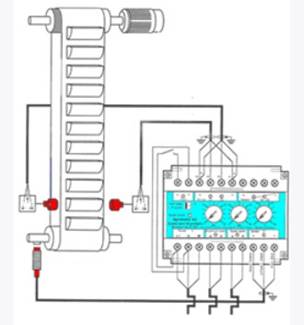
Slika 3.3 Primjena senzora kod hidrauličkog cilindra
LITERATURA
- Vlatko Doleček, Isak Karabegović ROBOTIKA, 1. Izdanje, Tehnički Fakultet Bihać 2002
- www.festo.com
- www.google.hr
preuzmi seminarski rad u wordu » » »
