OSTALI SEMINARSKI RADOVI
IZ ELEKTRONIKE / ELEKTROTEHNIKE |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SENZORI BLIZINE
TEHNIČKE KARAKTERISTIKE
Definicija. Senzori blizine imaju izlazni signal koji se mijenja kada je blizina objekta (proximity) veća ili manja od određene vrijednosti.Zbog toga se često nazivaju relejnim senzorima odnosno prekidačima, čije ime zavisi od fizičkog principa na kome rade:induktivni, kapacitivni,ultrazvučni, optoelektronski i sl.
Senzori blizine su jeftiniji, jednostavni i izdržljivi.Njihov informacioni kapacitet od jednog bita je mali, ali i pored toga imaju važnu ulogu tokom izvršavanja automatskih procesa – zavisno od izlaznog signala proces počinje, završava, mijenja se ili prekida.U robotici se primjenjuju pri registracicji (brojanju) radnih komada i pri detekciji prisustva objekta ili prepreka.Odlikuju se visokim meterološkim i tehnološkim vrijednostima.Terminologija statičke i električne karakteristike, projektovanje, kablovski priključci, kučišta, primjena u eksplozivno opasnim prostorima, ispitne i test procedure propisani su europskim standardima EN 50008 – EN 50044.
Parametri statičke karakteristike. Zbog načina na koji rade, senzori blizine imaju relejnu statičku karakteristiku sa histerezom (slika 1.a).Senzorski dio spojen je na odgovarajuće elektronsko kolo čiji je izlaz zatvoren (NC, prema normally closed) ili otvoren (NO, prema normally open).Stanje NC često se označava sa ON (uključen) i pridružuje mu se logička jedinica, a stanje NO tada se oznnačava sa OFF (isključen) i pridružuje mu se logička nula.
Preklopno rastojanje ili opseg djelovanja je udaljenost pri kojoj se mijenja izlazni signal. Zbog varijacije u tehnološkim i konstrukcionim parametrima, uticaja temperature i nestabilnosti napona napajanja, nominalna vrijednost preklopnog rastojanja ima samo teorijski značaj.Za tehničku primjenu relativni su sljedeći parametri (slika 1.b) :
- Realno preklopno rastojanje S koje se razlikuje od nominalnog za ±aS. Koeficijent a¸ obuhvata proizvodne i konstrukcione toleranse definisane pri nominalnom naponu napajanja i radnoj temperaturi od 20°C i ima maksimalnu vrijednost 0,1.
- Efektivno preklopno rastojanje S koje se ralikuje od nominalnog za ±aS. Koeficijent a odražava promjenu temperature
- Operativno preklopno rastojanje S , koje odgovara dozvoljeim uslovima rada .
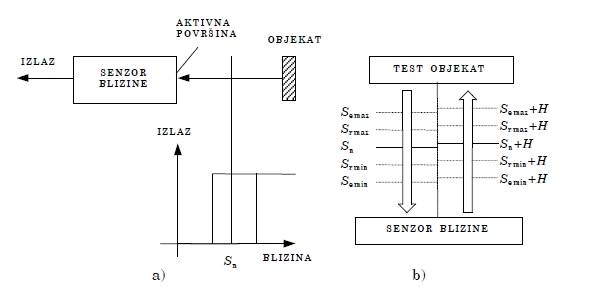
Slika 1. Statička karakteristika senzora blizine. a) relejna karakteristika b) opeg djelovanja
Histereza statičke karakteristike definiše se kao nepodudarnost između preklopnog rastojanja kada se detektovani objekat približava senzoru i preklopnog rastojanja kada se detektovani objekat udaljava od senzora. Histeraza se izražava kao apsolutna vrijednost ili u procentima nominalnog preklopnog rastojanja.
Ponovljivost statičke karakteristike predstavlja tačnost efektivnog preklopnog rastojanja S za dva sukcesivna prekidačka stanja između kojih je interval od osam sati, pri ambijentnoj temperaturi 15°C<t<30°C i pri napajanju koje varira najviše ±5% od nominalne vrijednosti.Treba napomenuti da su u ponovljivost sumarno uključeni efekti promjenjivih uslova sredine, histereze i drifta.
Frekvencija priljučivanja f je maksimalni broj uklopnih ciklusa u jednoj sekundi pri određenim uslovima. Jedan uklopni ciklus definiše se kao odnos ON/OFF, uz primjenu standardnog test objekta sa tačni propisanim oblikom, dimenzijama i materijalom od kojeg je napravljen.U zavisnosti od fizičkog principa rada senzora specificirani su odgovarajući test objekti i odnosi ON/OFF (1/1 ili 1/2) .
Električne karakteristike.Napajanje senzora ostvaruje se dvožično preko pojačavača čiji se rad kontroliše potrošnjom, tj. strujom senzora.Za pojačavač se specificiraju sljedeći parametri:
- Napon napajanja U sa određenom strujom kratkog spoja I(ks) ;
- Vrijednost struje I(pt) kada je senzor u tački preklapanja;
- Struja I1 koja indicira prekid napojnog voda ili otkaz senzora, pri čemu je vrijednost I1 manja od minimalne vrijednosti radne struje u kolu;
- Struja I2 koja označava kratak spoj u napojnom vodu ili otkaz senora, pri čemu je vrijednost I2 veća od maksimalne vrijednosti radne struje u kolu;
Izlazni stepen je npn ili pnp tipa.U prvom slučaju opterećenje se priključuje između izlaza i negativnog pola napajanja (pozitivna logika), a u drugom slučaju imeđu izlaza i pozitivnog pola napajanja (negativna logika), (slika 2.a,b).
Označavanje. Standardni senzori blizine imaju dvožični izlaz, koji je u normalnom stanju otvoren (NO) ili zatvoren (NC).Složenija električna kola omogućavaju da se za normalno stanje, u zavisnosti od konkretnih uslova primjene, odabere NO ili NC.U tom slučaju na izlazu su tri priključka.Senzor sa četiri priključka omogućava istovremenu upotrebu stanja NO i NC (slika 2).
Ekonomski parametri.Velike mogućnosti u primjeni i niska cijena uslovili su da na promet senzora blizine otpada oko 17% svih senzora. Za ilustraciju može se navesti da je za 1994. u SAD predviđena njihova prodaja u iznosu od 165 miliona dolara, pri čemu je ukupna vrijednost tržišta senzora procjenjena na jednu milijardu dolara.
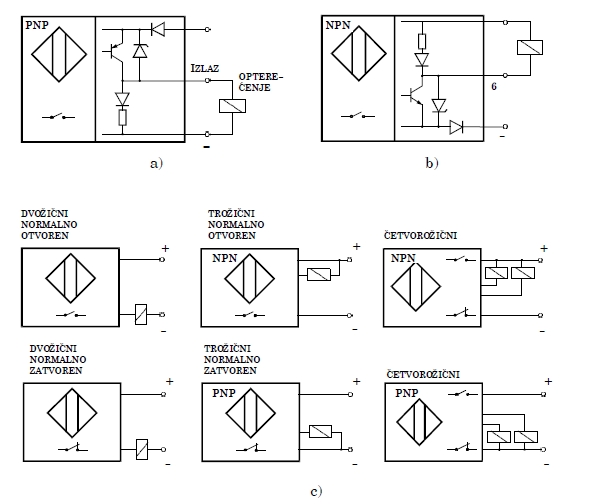
Slika 2. Izlaz senzora blizine. a) pnp b) npn c) simboličko označavanje
ELEKTROMEHANIČKI SENZORI
Elektromehanički prekidači su najstariji senzori blizine. Mikroprekidač je ugrađen u kućištu,a kontakti se aktiviraju pomoću poluge koja ima raznovrsne oblike,zavisno od namjene. Priključivanje električnih kontakata u određenoj poziciji realizuje se sa tačnošću ±2mm, radna temperatura je od -65°C do +550°C, frekvencija priključivanja 100-300 uklopnih ciklusa u minuti,a vijek trajanja je ograničen na milion-10 miliona priključivanja. Ovakvi prekidači su jeftini i mogu se direktno,bez pojačavača,upotrijebiti za prekidanje istosmjerne i naizmjenične struje do 25 A.
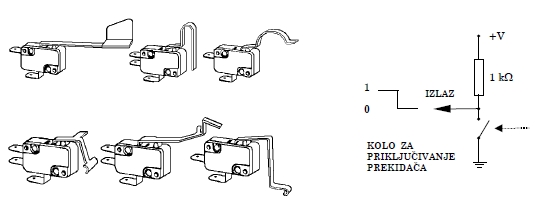
Elektromehanički senzori
Rid-releji (reed-switch) sa mehaničkim kontaktima preteče su savremenim senzorima blizine. Elastični kontakti rid-releja prave se od feromagnetnog materijala i hermetički su zatvoreni u kapsuli ispunjenoj inertnim gasom. Kontakti su u normalnom stanju otvoreni,a kada se približi stalni magnet pričvršćen na ruci robota ili radnom objektu, kontakti se zatvaraju. Dobre osobine senzora na bazi rid-releja su visoka pouzdanost od preko 10 miliona prekidanja, tačnost i histerezu ±1µm, temperaturni opseg rada od -20°C do +70°C, neosjetljivost na vlagu i mogućnost rada u eksplozivno opasnoj sredini. Loše osobine su preklop sa odskakanjem (treperenje kontakta) i relativno veliko vrijeme uspostavljanja novog stanja.
Elektronski senzori blizine nemaju nedostatke svojih preteča sa mehaničkim kontaktima,a zadržavaju sve njihove dobre osobine.
ELEKTROMAGNETSKI SENZORI BLIZINE
Induktivni senzori
Princip rada temelji se na zavisnosti induktivnosti kalema od promjene magnetske otpornosti.Sa približavanjem metalnog predmeta slabi magnetska otpornost kalema i raste induktivnost. Kada se predmet udaljava, dešava se suprotna pojava. Parametri elektromagnetskog kola i karakteristike objekta određuju zonu detekcije.
Standardni test objekat za induktivni senzor blizine definisan je kao kvadratna čelična pločica (ČE 0300) debljine 1 mm sa stranicom čija je dužina jednaka prečniku aktivne površine cilindričnog senzora (slika 3.a). Pomjeranjem test objekta u horizontalnom i vertikalnom pravcu senzor će se aktivirat kada prednja ivica objekta dođe u određenu tačku. Spajanjem ovih tačaka dobiva se kriva odziva (slika 3.b).
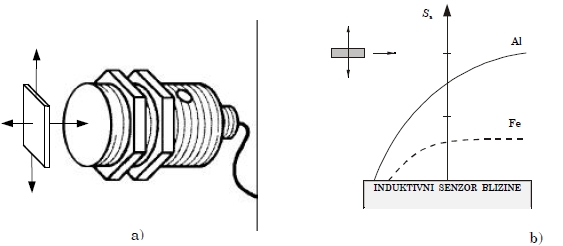
Slika 3. Testiranje induktivnog senzora a)standardni test objekat b)krive odziva za željezo i aluminijum
Induktivni senzor blizine može se primjeniti i za detekciju metalnih objekata koji nisu od čelika.Tada je potrebno korigovati nominalnu krivu odziva sa koeficijentom korekcije koji se definiše u odnosu na nominalno preklopno rastojanje Sn .Npr. za lijevano željezo koeficijent korekcije je 1,1 , za nehrđajući čelik 0,7, za mesing 0,4-0,5, za aluminijum 0,35-0,4. Kada je radni objekat veći od test objekta, preklopno rastojanje jedva će se promjeniti, ali kada je radni objekat manji ili tanji od test objekta, preklopno rastojanje jako se redukuje. Zato je podatak o dimenzijama senzora bitan za pravilan izbor senzora.
Struktura. Induktivni senzor sa jednosmjernim izlaznim signalom sastoji se od kalema kao primarnog osjetilnog elementa, oscilatora koji generiše izmjenično elektromagnetno polje, demodulatora koji pretvara promjenu amlitude u jednosmjerni signal, prekidačkog stepena (Smitovog trigera) i pojačavača (slika 4.a).
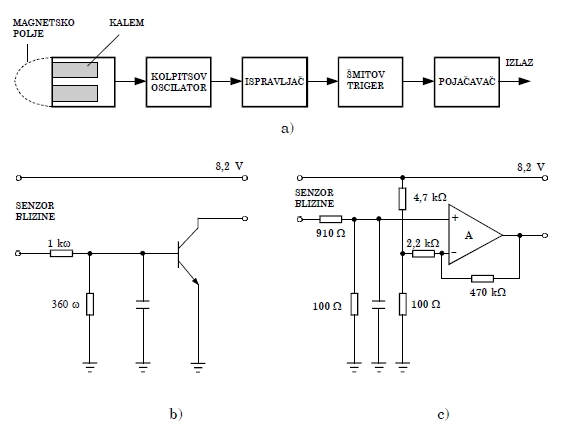
Slika 4. a) blok shema b) tranzistorsko prekidačko kolo c) prekidačko kolo sa OP-om
Čim se uključi napajanje, počinju oscilacije pri rezonantnoj frekvenciji f. Zbog ovih oscilacija, u smjeru ose senzora javlja se elektromagnetno polje. Kada metalni objekat uđe u polje , na njegovoj površini indukuju se vrtčožne struje koje smanjuju energiju polja.Gubici energije zavise od parametara polja, geometrije i fizičkih osobina materijala od kojeg je napravljen objekat. Proračun gubitaka zbog vrtložnih struja za objekat od lima debljine d provodi se pomoću formule:
(1)
gdje su: ρ-specifična električna otpornost lima, f- frekvencija pobudnih oscilacija, Bmax- amplituda magnetne indukcije.Zbog ovih gubitaka smanjuje se faktor dobrote kalema Q=ωL/R.To je opterećenje na rad oscilatora i amplituda oscilacija opada. Sa približavanjem objekta redukcija amplitude sve je izraženija i, na kraju, strujno kolo sasvim se prekida. Kolo trigera mijenja stanje izlaznog pojačavača i senzor iz normalno zatvorenog (NC) prelazi u normalno otvoreno stanje (NO).
Električne karakteristike induktivnih senzora blizine propisane su standardima.Najvažniji parametri su:
- Stabilan napon napajanja Uo=7-9V (preporučuje se 8,2V) sa strujom kratkog spoja I(ks)=7-16 mA (preporučuje se 8,2 mA);
- Struja Ipt=0,2-2,1 mA kada je senzor u tački preklapanja;
- Struja I1=0,05-0,15 mA, koja indicira prekid napojnog voda ili otkaz senzora;
- Struja I2=6,5-7,45 mA, koja indicira kratak spoj u napojnom vodu ili otkaz senzora, pri čemu navedenom opsegu struje odgovara ekvivalentna otpornost senzora od 360Ω do 100Ω i napon napajanja 8,2V.
Radna vrijednost struje ovisi od samog senzora i određuje se u skladu sa predhodnim tehničkim parametrima. Za kontrolu rada pojačavača unutar definisanih granica upotrebljavaju se diskretna kola – tranzistorska ili sa operacionim pojačavačem (slika 4.b,c)
Matematički modeli induktivnih senora blizine opisuju zavisnost induktivnosti L od udaljenosti objekta D. Pri gradnji matematičkog modela L(D) potrebno je odrediti uslove funkcionisanja, koordinatni sistem, aproksimaciju modela i parametre modela.
Uslovi koji određuju funkcionisanje senzora su:
(2)
Induktivnost Lo pri potpunom kontaktu senzora i objekta za D=0: ![]()
(3)
Induktivnost LINF kada je objekat daleko od senzora, tj. za D→∞: ![]()
- Monotona promjena L(D) u intervalu D€[0, ∞];
(4)
Osjetljivost odnosno konačna vrijednost prvog izvoda: ![]()
Treba napomenuti da su navoji kalema smješteni u kućištu pa objekat nikad neće u potpunosti zatvoriti magnetno kolo, te će Lo i So uvijek imati konačne vrijednosti.
Koordinatni sistem u kojem se gradi matematički model je najčešće pravougaoni, pri čemu se varijable predstavljaju u relativnom obliku radi jednostavnijeg poređenja karakteristika dva različita senzora.Ove varijable su:
- Relativno rastojanje DR i definiše se u odnosu na karakteristični geometrijsku dimenziju senzora Dref:
(5)
- Relativna induktivnost:
(6)
Aproksimacija modela.Zavisnost L(D) odnosno LR(DR) je hiperbolna funkcija koja se aproksimira kao eksponencijalna funkcija sa dva, tri ili četiri nezavisna parametra.U praksi se najčešće upotrebljava funkcija sa tri parametra:
(8)
(7)
(9)

Parametri modela. Ako je konačni model u obliku eksponencijalne funkcije (7) potrebno je odrediti parametre A, B i C pomoću poznatih vrijednosti Lo, L1, L1/o, Linf i Dref:
- Za DR=1, tj. za D= Dref iz jednačine (7) dobija se da je:
(10)
odatle se lako nalazi relacija za računanje parametra B:
(11)
- Za određivanje parametra C može se uzeti bilo koja vrijednost, ali je najpogodnije DR=1/e, tj. D= Dref/e, za koju jednačina (7) ima oblik:
(12)
odakle se, poslije logaritmiranja dobija parametar C:
(13)
Na slici 2.6 prikazan je induktivni senzor blizine U-tipa i uticaj parametara B i C na oblik statičke karakteristike modelirane funkcijom (7). Referentna udaljenost objekta Dref za ovaj tip senzora definisana je kao rastojanje između osa polova jezgra. Najpovoljnije je da se radna tačka (preklopno rastojanje) induktivnog senzora odabere u oblasti visoke osjetljivosti, ali je tada objekat suviše blizu i postoji rizik od mehaničkog oštećenja. Zato se u praksi preklopno rastojanje određuje za DR>0,05.
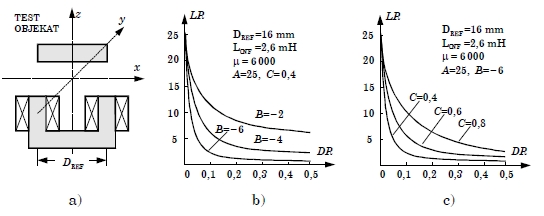
Slika 5. Analiza induktivnog senzora U-tipa: a) konstrukcija b) uticaj parametra B na izgled krive LR=LR(DR) c) uticaj parametra C na izgled krive LR(DR)
Način gradnje. Induktivni senzori blizine imaju U, cilindrični ili primatični oblik (slika 6). Kućište je napravljeno od nehrađajućeg čelika ili polimera.Često su na kućištu ili konektoru ugrađene LED diode za vizuelnu indikaciju stanja ON/OFF i ispravnosti napajanja. Kod prizmatičnog senzora obično postoji mogućnost da se čeona povšina kalema zakrene za 90°, čime se olakšava ugradnja na manje dostupnim mjestima.
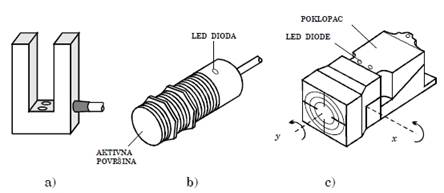
Slika 6. Konstrukcija. a) U-tip b) cilindrični c) prizmatični
Montaža i primjena. Induktivni senzori blizine lako se ugrađuju. Od konkretne primjene zavisi koji će se tip senzora odabrati i na koji će se način ugraditi. Ako metal noseće konstrukcije ne djeluja na induktivnost, tada je najjednostavnija direktna ugradnja kao na slici 7.a. Da bi se izbjegli utjecaji armature na induktivnost, senzor se može ugraditi na udubljenju, pri čemu je ivica armature udaljena od aktivne površine za neki iznos ustanovljen eksperimentalno (slika 7.b)
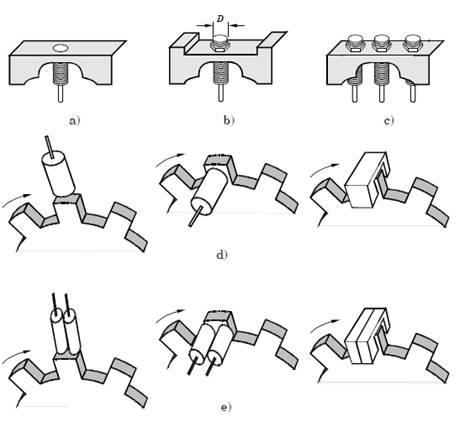
Slika 7. a) direktna ugradnja b) ugradnja u udubljenju c) ugradnja u nizu d) detekcija ugaone brzine e) detekcija ugaone brzine i smjera vrtnje
Više senzora istog tipa moguće je ugraditi u nizu – jedan do drugog. Tada je važno da se održi minimalno dozvoljeno rastojanje između aktivnih površina (1D-3D) kako ne bi došlo do uzajamnog djelovanja (slika 7.c). Induktivni senzori obično se ugrađuju na nepokretnom dijelu armature, ali zahvaljujući savitljivim i lako izmjenjivim priključnim kablovima jednostavna je ugradnja i na pokretnim dijelovima, npr. na ruci robota.
Induktivni senzori blizine često se upotrebljavaju za detekciju brzine vrtnje osovine. Na osovinu se tada postavljaju nazubljeni diskovi od feromagnetnog materijala. Prekidač se montira radijalno i aksijalno u odnosu na disk, odnosno da zabci prolaze kroz procjep senzora (slika 7.d). Za detekciju smjera vrtnje potrebna su dva senzora, koji su montirani jedan do drugog, tako da su njihovi ulazni signali fazno pomjereni za 90° (slika 7.e). Stanja ovakvog para mijenjaju se po redosljedu 00, 01, 11 i 10 za direktni smijer vrtnje, odnosno obrnuto za reverzibilni smijer vrtnje.
Tehničke karakteristike. Induktivni senzori blizine odlikuju se velikom pouzdanošću, kompaktnom gradnjom i otpornošću na hemikalije, mehaničke vibracije i vlažnost. Imaju značajne prednosti u odnosu na mehaničke: bezkontaktni preklop bez treperenja, mala potrošnja, teorijski neograničen vijek trajanja, zaštita od preopterećenja, zaštita od kratkog spoja i zaštita od nepravilnog priključivanja. Radna temperatura je u opsegu -25˚C do +80˚C, a za specijalne konstrukcije opseg je veći: -40˚ do + 100˚C. Frekvencija priključivanja veća je od senzora manjih dimenzija jer oni imaju manju aktivnu površinu i manji opseg djelovanja npr. f=50 – 2500 Hz za aktivnu površinu sa prečnikom D<1 mm i preklopnim rastojanjem Sm=1-2 mm.
Za U-tip senzora nominalni opseg djelovanja je 2-30 mm, preklopna tačka je u procjepu na 60% dubine, histereza je 5-10% nominalnog opsega, radni napon 10-30V, nominalni napon na izlazu je 8V, a frekvencija priključivanja je 25-5000 Hz. Za cilindrični i prizmatični tip karakteristični su sljedeći podaci: prečnik (dužina strane) aktivne površine 20-100 mm, nominalni opseg djelovanja 0,8-25 mm, operativni opseg je 0< So < 0,8Sm, histereza je ±5%, a ostali podaci su slični kao i kod U-tipa. Napajanje je naizmjenično 220V, pri čemu je u jednosmjernim kolima napon 10-30V sa naizmjeničnom komponenetom ( ripple) ±10% od te vrijednosti.
Specijalni elektromagnetski senzori
Specijalni senzori napravljeni su da izdrže veliki dinamički pritisak od nekoliko stotina bara, da rade u eksplozivno opasnim prostoru, da se postavljaju u sigurno stanje u slučaju otkaza i dr.U kalsi elektromagnetskih za ove namjene postoje novi tipovi senzora blizine: tankoslojni, Holovi i magnetootpornički.
Tankoslojni induktivni. Specijalni tip induktivnog senzora blizine na bazi vrtložnih struja izgrađen je tehnikom tankog sloja. Tankoslojni spiralni navoji nanijeti su sa obje strane podloge (slika 8.a). Geometrijski i električni pokazatelji takvog kalema su: debljina bakarnog sloja 35µm, debljina podloge 1,6µm, vanjski prečnik spirale 35mm, unutrašnji prečnik 9mm, broj obilazaka spirale 11, otpornost navoja 0,8Ω induktivnost 10mH. Tankoslojni kalem priključen je na Colppitsov sinusni LC-oscilator sa frekvencijom fo=2-3 MHz. Kada se objekat od feromagnetnog materijala približava senzoru, smanjuje se magnetska otpornost kola, odnosno povećavaju se induktivnost i frekvencija (slika 8.b,c.). Vrtložne struje koje se indukuju u feromagnetnom objektu ograničavaju taj porast. Kada je objekat napravljen od neferomagnetnog materijala, tada na promjenu frekvencije utječu samo vrtložne struje.
Tankoslojni senzori blizine lako se ugrađuju u niz ili matricu, sto se praktikuje kod detekcije oblika, lokacije i orjentacije većih metalnih objekata.U tom slučaju senzorska matrica postavlja se ispod ploče od pleksiglasa debljine 6mm da bi vertikalno rastojanje između objekta i niza bilo konstantno.
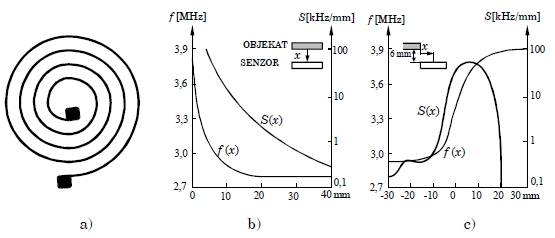
Slika 8. Tankoslojni induktivni senzor blizine: a)izgled b)statička karakreristika f(x) i osjetljivost S(x) pri čeonom približavanju objekta c)statička karakeristika i osjetljivost pri bočnom približavanju objekta
(14)
![]()
pa se nosioci sa pozitivnim naelektrisanjem (q>0) sakupljaju na jednoj površini poluprovodniče pločice, a nosioci na negativnim naelektrisanjem (q<0) na suprotnoj površini. Kao kumulativni rezultat između ovih površina nastaje Halov napon
(15)
gdje su: d – debljina ploče, k - Halova konstanta, koja zavisi od karakteristika poluprovodnika i temperature. Tipična vrijednost Halovog napona je nekoliko mV, vrijednost izlane otpornosti od nekoliko oma do nekoliko stotina oma. Treba napomenuti da je porast Halovog napona pomoću struje I ili smanjivanja debljine d ograničen zbog zagrijavanja pločice.
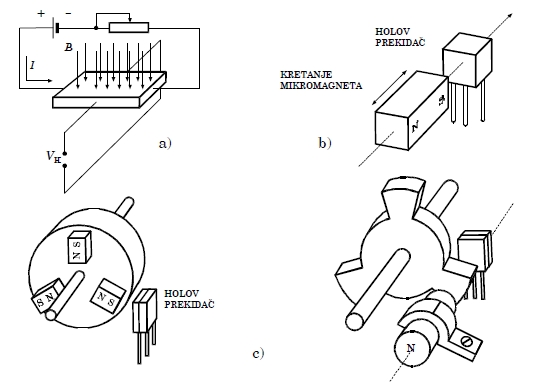
Slika 9. Senzor blizine na bazi Halovog efekta: a)Halov efekt b)Senzor c)detekcija ugaone brzine
Senzori blizine na bazi Halovog efekta primjenjuju se u robotici tako da se stalni mikromagnet pričvrsti na radni objekat. Kretanje objekta može biti translatorno i rotaciono (slika 9.b) kada magnetski fluks definisanog smjera zbog približavanja magneta dostigne određenu vrijednost, na izlazu se generiše Halov napon. Udaljavanjem magneta, izlazni napon postaje jednak nuli. Kako je Halov napon malog nivoa, on najčešće služi kao upravljački napon za tranzistor koji se nalazi u istom kućištu. Tranzistor radi u prekidačkom režimu, tako da se na izlazu dobije napon potrebnog nivoa. Senzor je obično napravljen tako da približavanjem južnog pola magneta mijenja stanje tranzistora, dok približavanje sjevernog pola nema nikakvog značaja.
Senori blizine na bazi Halovog efekta primjenjuju je i za mjerenje ugaonog položaja i ugaone brzine. Na (slici 9.c ) prikazane su dvoje praktične realizacije za mjerenje ugaone brzine.U prvom slučaju na rotirajućem disku smješteni su mikromagneti, a u drugom slučaju disk ima oblik propelera. Prolaskom magneta pored feromagnetskih krakova dobija se niz pravougaonih impulsa, čija je frekvencija proporcionalna mjerenjoj brzini. Posebno su interesantni diskovi koji po obodu imaju veliki broj magneta, tako da se dobija tzv. prstenasti magnet.
Magnetorezistorski senzor mijenja svoju otpornost R u zavisnosti od magnetnog polja (slika 10.a). Magnetno polje indukcije Bmax koji dovodi do zasićenja u promjeni otpornosti, maksimalna promjena otpornosti ∆Rmax vrijednost otpornosti Ro pri B=0 i osjetljivost ∆R/∆B projektuje se pogodnim izborom materijala i geometrije senzora u skladu sa konkretnom primjenom. Obično kroz magnetorezistor prolazi konstantna struja I, a promjena magnetskog polja izazvanog približavanjem objekta na kome je pričvršćen stalni magnet detektuje se kao promjena napona na krajevima magnetorezistora.
Magnetorezistorski senzor je pogodan za mjerenje pozicije i brzine objekta. Slika 10.b prikazuje detektor ugaone pozicije, odnosno brzine. Nailaaskom zubaca od feromagnetnog naterijala mijenja se magnetno polje u kojem se nalazi senzor, tako da se na izlazu doboja odgovarajući naponski impuls. Konstrukcija sa dva magnetorezistora na rastojanju 1/2 širine zubca omogućava sa se odredi smijer kretanja.Tipični podaci koji se odnose na magnetorezistore su: dužina 2-2,5 mm, nominalna otpornost 180Ω, 400Ω ili 500Ω, magnetna indukcija pri kojoj dolazi do zasićenja u promjeni otpornosti B=0,8-2T, nominalna struja 5mA i frekventni opseg 0-5 MHz. Minimalno rastojanje između feromagnetnih zubaca je 0,05 mm, tipična tačnost ±1-2%, a uticaj temperature je do ±1%Rnom/˚C.
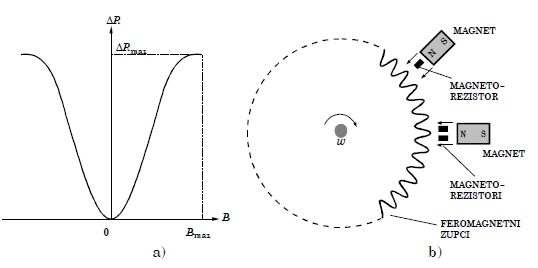
Slika 10. Magnetorezistorski senzor: a)tipična karakteristika b)detekcija ugaone pozicije (brzine)
KAPACITIVNI SENZORI BLIZINE
Princip rada. Kapacitivni senzori blizine sastoje se od kondenzatora kao primarnog osjetilnog elementa koji se priključuje na oscilator ili pojačavač. U oba slučaja kapacitivnost kondenzatora mijenja se zbog ulaska objekta i promjene dijelektrične konstante između elektroda ili zbog promjene rastojanja između eleketroda od kojih je jedna na aktivnoj površini senzora, a druga na objektu.
Konstrukcija sa RC-oscilatorom napravljena je tako da pojava objekta između elektroda dovede do nastanka naizmjeničnog napona (slika 11.a).U prekidačkom kolu (ispravljač sa Šmitovim trigerom) naizmjenični napon oscilatora se ispravlja i prekida, a rezultujući jednosmjerni napon mijenja ON/OFF stanje izlaznog stepena. Podešavanjem povratne sprege između oscilatora i prekidačkog kola postavlja se vrijednost preklopnog rastojanja.
Konstrukcija sa pojačavačem obično ima kapacitivni senzor blizine sa promjenjivim rastojanjem između elektroda (slika 11.b)
Izlazni napon e(out) je
(16)
gdje su: K - konstanta, C - kapacitivnost na ulau u pojačavač, e – amplituda naizmjeničnog pobudnog napona i S – aktivna površina elektroda. Naizmjenični napon se ispravlja i upoređuje sa naponom praga Šmitovog trigera, koji je podešen na vrijednost ekvivalentnu preklopnom rastojanju. Izlaz trigera mijenja ON/OFF stanje izlaznog stepena.
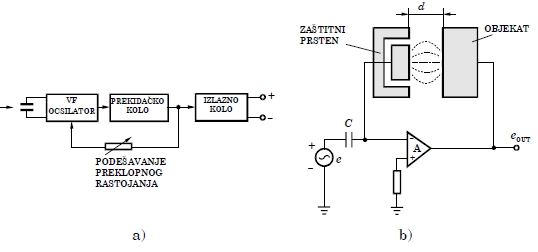
Slika 11. Kapacitivni senzor blizine: a)blok-shema sa oscilatorom b)shema sa pojačavačem
Opseg djelovanja zavisi od vrste materijala od kojeg je napravljen radni objekt.
Razlikuju se tri slučaja:
- Radni objekt je od neprovodnog materijala – dielektrika (staklo, drvo, plastika). Promjena dielektrične konstante medija u aktivnoj zoni je mala, zbog čega je preklopno rastojanje malo (20-30 mm).
- Radni objekt je od metala, tako da do promjene kapacitivnosti dolazi na većoj udaljenosti nego u predhodnom slučaju, tj. preklopno rastojanje je oko 40 mm.
- Radni objek je od metala koji je uzemljen, pa je apsorpcija naelektrisanja još više izražena, pa je preklopno rastojanje približno dvostruko veće nego u prvom slučaju (50-60 mm).
Prisustvo vlage i prašine, također i porast temperature, povećavaju preklopno rastojanje. Zato se tačna vrijednost udaljenosti pri kojoj dolazi do priključivanja može utvrditi samo za određene radne uslove. Kapacitivni senzori neupotrebljivi su za detekciju predmeta od poroznih materijala ( stiropor, spužva) jer imaju loše dielektrične osobine, odnosno njihova relativna dielektrična konstanta je blizu jedinice.
Konstrukcija i termičke karakteristike. Blok-struktura i konstrukcija kapacitivnih senzora blizine slična je induktivnim – najčešće se prave u obliku cilindra prečnika d= 10-30mm i dužine l= 60 - 100mm ili prizme dimenzija od 40x40x100 mm do 80x80x40mm.Standardni test objekat je od stakla ili PVC plastike, dimenzija 100x100x100 mm. Za objekte od drugih materijala deklarišu se odgovarajući korekcioni faktori: za metale 1, za vodu 1, za staklo 0,5 , za keramiku 0,4 , za drvo 0,2-1. Preklopno rastojanje podesivo je u intervalu 2-10 mm do 5-50 mm, histereza je 10%Sm, obnovljivost je manja od 0,01 mm, frekvencija priključivanja 10-100 Hz, radna temperatura je od -30˚C do +70˚C , dobra je podnošljivost na vibracije amplitude do 1mm i frekvencije do 50 Hz, napon napajanja je jednosmjerni (10-30V) ili naizmjenični (20-220V, 50 Hz).
ULTRAZVUČNI SENZORI BLIZINE
Princip rada
Ultrazvučni senzori blizine sastoje se od ultrazvučnog primopredajnika, uređaja za formiranje izlaznog signala(sl. 12.a) i pojačavača. Promopredajnik periodično emituje ultra zvučni talas frekvencije 10-400kHz, a zatim prima reflektovani talas (eho) od radnog objekta.U uređaju za formiranje izlaznog signala određuje se vrijeme t između emitovanja i prijema signala i, na osnovu ponate brzine c prostiranja ulzrazvučnog talasa kroz mjerni medijum (obično je to vazduh),izračunava udaljenost objekta: x=tc/2.
Ovaj način rada često se označava akronimom TOF ( time of flight ). Rezultat računanja upoređuje se sa preklopnim rastojanjem i, u skladu s tim, dolazi do promjene izlaznog signala sa logičke nule na logički jedinicu, ili obrnuto – sa logičke jedinice na logičku nulu – što zavisi od toga da li se objekat približava i udaljava.
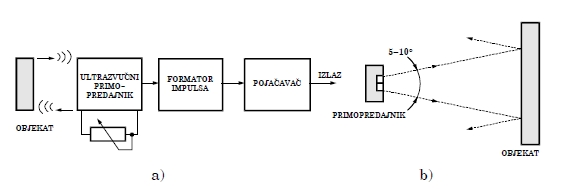
Slika 12. a) strukturna blok shema b) emitovani i eho signal
Od senzora do objekta ultrazvuk se širi po konusu 5-10 (slika 12.b). Najčešće se senzori isporučuju sa inicijalno postavljenim preklopnim rastojanjem, pa se onda posebnim potenciometrom podešava željena vrijednost unutar 0-100% maksimalne vrijednosti. Podaci o podešenoj vrijednosti odnose se na slučaj kada se objekat kreće duž ose zračenja. Objekat se može kretati i normalno na osu zračenja, ali je tada efektivno preklopno rastojanje potrebno odrediti eksperimentalno.
Problemi primjene
Detekcija blizine objekata na osnovu vremene prelaska ultrazvuka od predajnika do prijemnika u načelu je jednostavna, ali se u gradnji senzora javlja više problema (nejednaka brzina prostiranja ultrazvuka u različitim medijima, zavisnost brzine od temperature i pritiska vazduha, slabljenje intenziteta zbog radijalnog širenja i apsorbcije, djelovanje šuma i dr. ).
Brzina ultrazvuka c različita je u pojedinim medijima. Npr. u vodi je 1500 m/s, u metalima 3000-6000 m/s, u staklu 5500 m/s, u stiroporu 500 m/s. O ovome se vodi računa u fazi projektovanja senzora, jer se senzor gradi za određenu namjenu.
Zavisnost brzine ultrazvuka od temperature vazduha pri normalnom atmosferskom pritisku opisuje se jednačinom:
(17)
gdje su: k odnos specifične toplote vazduha pri konstantnom pritisku i specifične toplote vazduha pri konstantnom volumenu, R univerzalna gasna konstanta i T apsolutna temperatura. Na osnovu ove zaisnosti, inače, pravi se apsolutni termodinamički akustički termometar, a u konkretnom slučaju služi za računanje stvarne vrijednosti c u jednačini (x=tc/2). Npr. na temperaturi T=273K brzina ultrazvuka je 331,5 m/s, a na temperaturi T=293K brzina ultrazvuka je 343,1 m/s.
Zavisnost brzine ultrazvuka od atmosferskog pritiska p (odnosno nadmorske visine H) opisuje se jednačinom:
(18)

pri čemu treba uzeti u obzir da je gustina vazduha funkcija temperature p=p(T). Npr. na 15°C pri normalnom atmosferskom pritisku na nivou mora brzina je c=340,29 m/s,a na 1000 m nadmorske visine je c=336,43 m/s.Varijacije pritiska vaduha u radnoj okolini robota u praksi su zanemarive, tako da se jednom izračunata korekcija brzine prema jednačini (15) može smatrati konstantnom: c(p)=const.
(19)
![]()
gdje je p¸- parcijalni pritisak vodene pare [Pa] i c0- brzina ultrazvuka na 0°C.
Slabljenje zbog radijalnog prostiranja. Predajnik ultrazvuka u praksi ima prizmatični, cilindrični ili složen oblik. Ako je udaljenost izvora šuma veća pet puta u odnosu na dimenzije predajnika, on se može tretirati kao tačkasti .Tada se ultrazvuk širi radijalno i intenzitet I mu opada sa kvadratom radijalnog rastojanja d od predajnika:
(20)
Pritisak ultrazvučnog talasa na rastojanju d1 od predajnika je P1=10log(I1/I0), a na rastojanju d2 je P2=10log(I2/I0). Pritisak opada sa povećanjem radijalne udaljenosti:
(21)

odakle nije teško izračunati da pri udvostručavanju udaljenosti slabljenje iznosi 6dB.
Slabljenje ultrazvučnog talasa zbog apsorpcije u vazduhu proporcionalno je približno kvadratu frekvencije. Zato mjerni opseg senzora postaje sve manji sa porastom frekvencije ultrazvuka i ograničen je na 10 m pri frekvenciji 100kHz. Apsorbcija se obično izražava u dB za rastojanje od 100 m i određenu frekvenciju.
Na slabljenje utiče i orjentacija reflektujuće površine. Kada ultrazvučni talas stigne do objekta, on se reflektuje pod uglom koji je jednak upadnom uglu, pa se orjentacija objekta mora poznavati sa tačnošću od nekoliko stepeni. Ako je površina hrapava sa neravninama srazmjernih talasnoj dužini ultrazvuka, tad apri refleksiji nastaje i difuija, što se manifestuje kao određeno slabljenje signala.
Ultrazvučni šumovi nastaju bog različitih procesa obrade u radnoj okolini robota: usitnjavanje metala, mašinske obrade metala, zavarivanja, raspršivanja boje i dr. Poželjno je da senzori rade sa frekvencijom ultrazvuka većom od 100kHz kako bi se izbjegao utjecaj šuma.
Gradnja i primjena
Način gradnje.Ultrazvučni senzori blizine prave se kao elektrostatički i pijezoelektrični. Elektrostatički imaju radnu frekvenciju 250kHz .Između dvije tanke metalne elektrode priključen je jednosmjerni prednapon, tako da se one privlače (slika 13.a). Kada se na ovaj prednapon superponira naizmjenični napon, na isti način (sa istom frekvencijom) mijenja se i privlačna sila između elektroda. Obično je jedna elektroda fiksirana, a druga upeta po obodu i vibrira u skladu sa silom proizvodeći ultrazvučne talase.Uređaj može da radi kao prijemnik:akustički signali uslovljavaju vibraciju elastične membrane modulišući tako kapacitivnost između elektroda, koji se detektuje odgovarajućim elektronskim kolima.
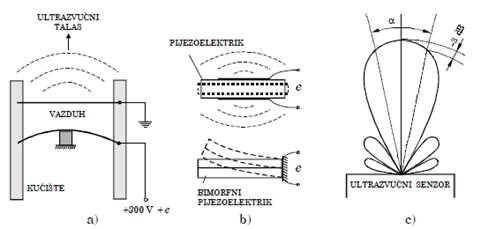
Slika 13. Ultrazvučni senzori: a)elektrostatički b)pijezoelektrični c) dijagram usmjerenosti
Pijezoelektrični primopredajnici prave se od pijezoelektričnih materijala. Kada se pijezoelektrična membrana priključi na naizmjenični napon, ona počne da osciluje i djeluje kao generator ultrazvuka (slika 13.b). Membrana može biti o bimorfna, tj. sastavljena od dva sloja, pri čemi se pri djelovanju napona jedan sloj isteže a drugi sabija (ili zadražava iste dimenzije). Membrana je prečnika 10-20 mm. Da bi se dobio što veći intenzitet emitovanih talasa, membrana se projektuje da radi na rezonantnoj frekvenciji .
(22)
gdje su: h – debljina membrane, E – Jangov modul elastičnosti i c - brzina ultrazvuka u pijezoelektričnoj membrani.Veća rezonantna frekvencija ima se za tanju membranu. Najpovoljniji rezultati postižu se pomoću tankoslojnih membrana 30-100 µm od pijezopolimera PVDF. Pošto je c=f λ, gdje je lamda talasna dužina ultrazvuka, dobija se da pri rezonantnoj frekvenciji talasna dužina jednaka dvostrukoj debljini membrane λ=2h.U praksi je rezonantna frekvencija 1- 10 MHz.
Tipični dijagram prostiranja ultrazvuka sastoji se od glavne i pomoćnih latica (slika 13.c). Kao mjera usmjerenosti obično se uzima ugao α koji omeđuje granice od -3dB, tj. tačka u kojim je amplituda signala manja od 3dB u odnosu na tačke duž ose prostiranja x gdje je α=0°. Širina snopa računa se pomoću formule:
(23)
gdje je D – efektivni prečnik membrane. Manja talasna dužina i veći prečnik membrane daju bolju usmjerenost.
Tipične konstrukcije ultrazvučnog senzora blizine imaju oblik prizme ili cilindra, približno istih dimenzija kao kod induktivnih ili kapacitivnih senzora blizine (slika 14.). Glava sa primopredajnikom može biti odvojena od elektronskog dijela, čime se omogućava ugradnja i na nepristupačnim mjestima.
Test objekat određuje se karakteristikama reflektujuće površine radnog objekta. Naime, objekat može biti od čvrstog, tečnog ili praškasto-granulastog materijala, ali je bitno da mu je površina glatka, sa neravninama manjim od 0,2 mm. Debljina objekta treba da je veća od 0,01 mm, a refletujuća površina da je pod uglom 90±3° u odnosu na pravac prostiranja ultrazvuka.
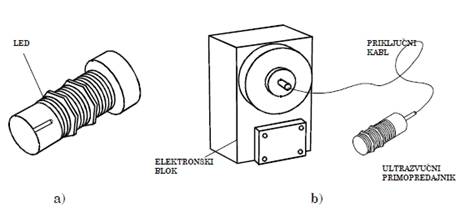
Slika 14. Ultrazvučni senzori: a)cilindrični b) rizmatični tip sa odvojenim primopredajnikom
Sa porastom temperature slabe reflektujuća svojstva objekta, pa zato radna temperatura treba da je manja od kritične t. Ova temperatura ustanovljava se eksperimentalno, a svojstvena je vrsti materijala od kojeg je napravljen objekat. Materijali kao što su pamuk, stiropor i guma imaju visok koeficijent apsorpcije ultrazvuka, pa je prisustvo objekata od takvog materijala moguće detektovati samo u odnosu na pozadinu sa dobrom refleksijom.
Ugradnja. Prilikom ugradnje ultrazvučnih senzora blizine vodi se računa o nizu iskustvenih pravila korisnih za smanjivanje interferencije sa drugim ultrazvučnim senzorima:
- Za zakretanje ultrazvučnog talasa primjenjuje se najviše dva reflektora sa kojima je moguće talas zakrenuti maksimalno dva puta za 90° i dovesti ga na osu paralelnu osi senzora (slika 15.a);
- Za smanjivanje refleksije sa drugih objekata koji se nalaze u blizini radnog objekta može se upotrijebiti dijafragma sa prorezima (slika 15.b);
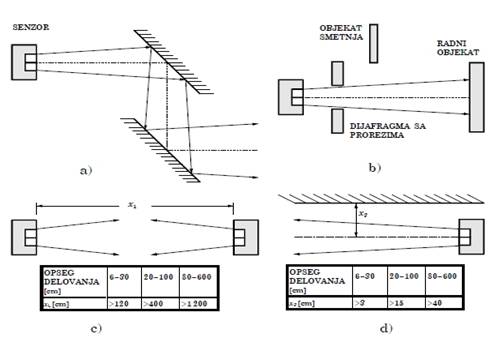
Slika 15. Ugradnja ultrazvučnih senzora. a) zakretanje ultrazvuka b) primjena zastora sa prorezima c) senzori na istoj osi d) senzor sa osom duž ravnog zida
- Za detekciju objekata raspoređenih lepezasto u odnosu na senzor može se upotrijebiti zastor sa odgovarajućim brojem proreza koji se otvaraju sukcesivno ili po nekom programu;
- Za dva senzora postavljena jedan naspram drugog na istoj osi potrebno je obezbjediti minimalno dozvoljeno međusobno rastojanje x1, koje zavisi od preklopnog rastojanja, a određuje se eksperimentalno (slika 15.c);
- Za dva senzora sa paralelnim osama koji zrače u istom smijeru, potrebno je izvjesno rastojanje x2 da ne bi došlo do uzajamne interferencije , pri čemu x2 zavisi od preklopnog rastojanja i orjentacije objekta u odnosu na osu senzora;
- Za senzor čija je osa paralelna nekom zidu neophodno je da se senzor postavi na rastojanje x2 od zida (slika 15.d);
- Za senzor koji se montira u koridoru između dva zida potrebno je obezbjediti minimalno rastojanje x4 između ose i zidova, što se, također, određuje eksperimantalno.
Primjena.Na slici 16. ilustrovane su tipične primjene ultrazvučnih senzora blizine.
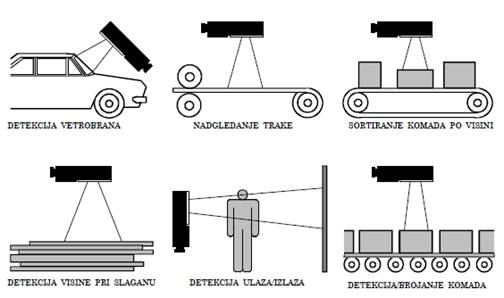
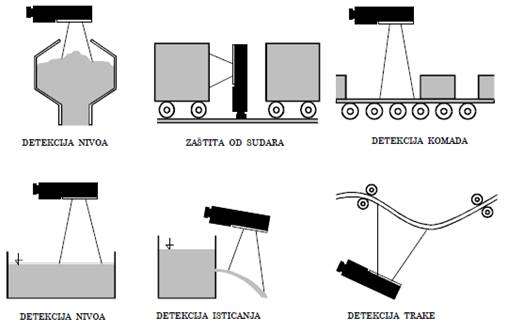
Slika 16. Primjeri primjene ultrazvučnih senzora
OPTOELEKTRONSKI SENZORI BLIZINE
Princip rada
Optički senzori blizine sastoje se od optičkog para (optocoupler) – predajnika i prijemnika. Kao predajnici služe svjetleće diode (LED) diode i laserske diode (LD), a kao prijemnicu upotrebljavaju se fototranzistori, fotodiode i fotootpornici. Najrasprostranjenija je kombinacija LED dioda i fototranzistor, pri čemi se radni predmet detektuje prekidanjem ili refleksijom optičkog signala. Svjetlost se obično ne emituje kontinualno, već u impulsima velike snage, ali rako da je srednja snaga impulsa u granicama dozvoljenog opsega koji se definiše za kontinualni rad. Na taj način postiže se veći put od predajnika do prijemnika. Za LED diodu ovaj put je ograničen na nekoliko metara, za LD diodu iznosi više desetina metara.
Predajnik i prijemnik rade usaglašeno u određenom području optičkog spektra.Obično je optički signal u području vidljive svjetlosti (λ=0,38-0,76 µm), u području kratkotalasne infracrvene svjetlosti (λ=0,76-3 µm) ili u području srednjotalasne infracrvene svjetlosti (λ=3 – 8 µm).Više se primjenjuju senzori u infracrvenom području jer normalno rade i u okolini sa dnevnim svjetlom.
Detekcija objekta na osnovu prekidanja signala svodi se, zapravo, na prepoznavanje prisustva objekta bez obzira na njegovu poziciju između predajnika i prijemnika, tj. na mjestu gdje je zrak prekinut (slika 17.a). Ovaj način rada je veoma pouzdan i pogodan je za objekte sa slabo reflektujućom površinom. Predajnik i prijemnik svjetlosti obično su jedan naspram drugog, ali mogu biti i jedan pored drugog kada se koristi ogledalo kao reflektor iza objekta (slika 17.b).
Optoelektronski senzori sa refleksijom na objektu, međutim, prepoznaju prisustvo objekta na tačno određenoj udaljenosti koja zavisi od intenziteta emitovane svjetlosti, koeficijenta refleksije materijala od kojeg je objekat napravljen i od orjentacije objekta u odnosu na predajnik i prijemnik (slika 17.c). Reflektovana svjetlost ima difuzni karakter, pa se zato senzori sa ovakvim načinom rada nazivaju difuzni.
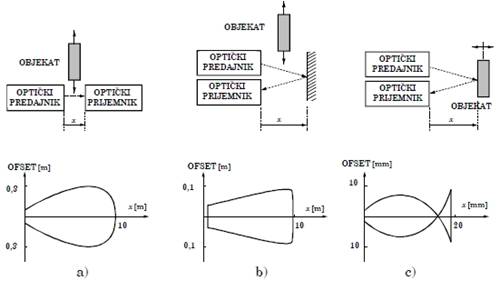
Slika17.a) prekidanje optičkog zraka b) refleksija sa površine iza objekta c) refleksija sa objekta
Za standardni test objekat upotrebljava se bijela ili siva karta 200x200 mm, a za druge materijale daju se faktori korekcije određeni eksperimentalno. Krive odziva za optoelektronske senzore pokazuju zavisnost intenziteta upadne svjetlosti od pozicije objekta. Intenzitet je najveći duž optičke ose priijemnika x i smanjuje se udaljavanjem od ose. Kriva odziva je simetrična a površina koju omeđuje predstavlja najveću oblast detekcije za datu osjetljivost prijemnika. Sa povećanjem osjetljivosti oblast detekcije se širi, a sa smanjivanjem osjetljivosti oblast detekcije se skuplja. Na slici 17. prikazani su tipični oblici ovih površina. Apscisa pokazuje opseg x, a ordinata ofset aktiviranja senzora zbog širenja optičkog zraka sa rastojanjem x.
Najveći problem u primjeni optoelektronskih senzora blizine je sakupljanje prašine, ulja i vodene pare na mikrosočivu predajnika, odnosno prijemnika, zbog čega dolazi do prigušenja optičkog signala. Zato je potrebno predvidjeti veće pojačanje u prijemniku. Eksces pojačanja je faktor koji se definiše kao relativno pojačanje u odnosu na minimalne radne uslove. Preporučuje se da faktor ima vrijednost 1,5 za čist vaduh be prašine, 5 za vazduh sa malo prašine i redovnim čišćenjem sočiva, 10 za umjereno prljav vaduh i povremeno čišćenje sočiva i vrijednost 50 za prljav vazduh i neredovno čišćenje sočiva.
(24)
![]()
(25)
![]()
Način gradnje. Optički parovi grade se u jednom ili u dva nezavisna kućišta od plastike. Kućišta su U-tipa cilindričnog ili pravougaonog oblika, malih su dimenzija i moguće ih je ugraditi skoro na svakom mjestu. Na manje dostupna mjesta otički zrak može se dovesti pomoću ogledala ili optičkog vlakna. Optičko vlakno pogodno je zbog malih dimenzija (d=100-400 µm) i neznatnog utjecaja progiba na amplitudu optičkog signala. Na slici 18.a prikazan je optoelektronski senzor blizine sa produžecima od optičkog vlakna:dovodno vlakno povezano je sa LED diodom, a prijemno vlakno sa fototranzistorom. Izlazni signal zavisi od rastojanja između objekta i optičkih vlakana. Za x=0 i x=∞ na na fototranzistoru nema signala, što znači da će refleksija, odnosno izlazni signal za neko x imati maksimalnu vrijednost.
Statička karakteristika ovog u suštini kontinualnog senzora jeste:
(26)
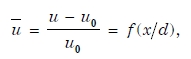
gdje su u i u0 - aktuelni i maksimalni izlazni napon na fototranzistoru, a x/d relativna udaljenost objekta u odnosu na prečnik vlakna (slika 18.b). Potenciometrom u izlaznom kolu diode podešava se nivo napona pri kome dolai do promjene izlaza, odnosnno podešava se željeno preklopno rastojanje. U novije vrijeme optička vlakna prave se i od akrilata, tj. providnog polimera. Plastična vlakna su jeftinija od staklenih, ali jako prigušuju svjetlost u određenim opsezima talasnih dužina (naročito IC), osjetljivi su na hemijske utjecaje i radna temperatura im je ograničena u intervalu od -30°C do +70°C.
Slika 18. Senzori blizine sa produžecima od optičkog kabla: a) izgled senzora b)statička karakteristika
Tehničke karakteristike. Preklopno rastojanje optoelektronskih senzora kreće se u širokom dijapazonu 0-1 mm za mala, 0-200 mm za srednja i 0-4 m za velika rastojanja, pri čemu su navedeni podaci a senzore sa refleksijom optičkog signala. Ukoliko se kao optički izvor upotrijebi LD , opseg djelovanja može biti više desetina metara. Slično je i za rastojanje između ppredajnika i prijemnika kod senzora sa prekidanje optičkog signala.Frekvencija prekidanja iznosi do 400kHz, ponovljivost je ±5% opsega, histereza je ±3%, radna temperatura je 0-50°C, napon napajanja jednosmjerni 10-30 V.
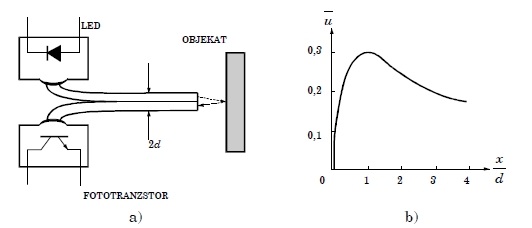
Primjena. Na slici 19. prikazani su raznovrsni primjeri koji ukazuju na velike mogućnosti primjene optoelektronskih senzora.
Slika 19. Primjeri primjene optoelektronskih senzora blizine na bazi LED diode i fototranzistora
Literatura:
[1] „Senzori i merenja“ , Mladen Popović, Sarajevo 2004.
[2] „Senzors“ , catalogue, Pepperl and Fuchs
[3] „Senzori u robotici“, Mladen Popović, Beograd 1996.
[4] „Senzori“ , (Elektronika u primjeni) , F.Kičić , 1991.
preuzmi
seminarski rad u wordu » » »
